



This is a full self-driving car behavioral cloning using End-to-End Learning approach and Computer Vision in Udacity Self-Driving Car simulator.
This project is a tiny implementation of NVIDIA End-to-End self-driving cars paper [1]
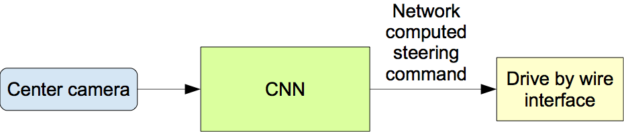
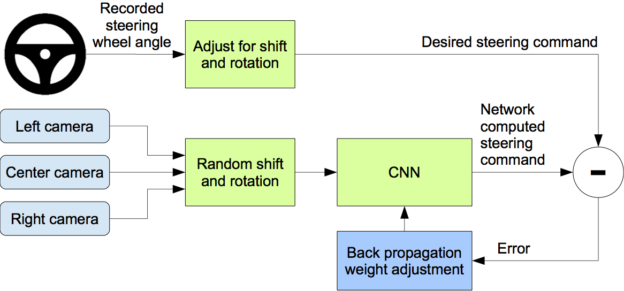
The system relies on a single Convolutional Neural Network (CNN) which takes visual data from cameras as input, and computes the steering command to drive the car.
Dependency installation
pip install -r requirements.txtUdacity Self-Driving Car simulator
The simulator communicates with the control/drive module bidirectionally, using a client-server architecture. The simulator is the server, and the control/drive module is the client.
Please refer to the official installation repo for guidelines.
Data collection & training
Start the udacity self-driving car Simulator

We have two modes:
- Training Mode: generates raw datas based on the driving examples and scenarios to fit the model

- Autonomous Mode: we use the model to drive the car autonomously

You can also choose the type of track the car will be driving on: flat or rougher
Dataset Format
After collecting the training data the simulator generates an IMG folder containing the images of the driving scene/environment and a driving_log.csv file mapped in the following form:
| center camera img | left camera img | right camera img | steering | throttle | break | speed |
|---|---|---|---|---|---|---|
| center_img_frame1.jpg | left_img_frame1.jpg | right_img_frame1.jpg | 0 | 0 | 0 | 0 |
| ... | ... | ... | ... | ... | ... | ... |
| center_img_frame_n.jpg | left_img_frame_n.jpg | right_img_frame_n.jpg | NA | NA | NA | NA |
This is because the car has 3 cameras: front left, front right and windshield camera
Convolutional Neural Network (CNN) Implementation, Training and Testing
The implementation, training and testing of the ConvNet is covered in this notebook.
Behavioral cloning is a type of imitation learning and offers many benefits when it comes to develop autonomous systems:
- learn directly from human demonstrations based on large amount real world collected data
- replay logging datas for debugging
- test unsual driving scenarios, system limitations
- training large amounts of unlabeled data
- Start the simulator in
autonomous mode - execute the following command to start driving!
python main.pyNotice: the training data was mainly collected in flat track mode, there still some improvement to be done to increase the model accuracy.

At the start the streering angle and throttle control commands are set to zero. After the communication with server is established the self-driving car increase its speed gradually.
If you want to help this project grow, feel free to submmit a PR or open an issue in case you encounter a problem running the project.
Future upgrades
- collect data in the rougher track
- increase model accuracy for rougher tracks
- add logger module
- [1] End to End Learning for Self-Driving Cars 2016 paper - NVIDIA
- [2] End-to-End Deep Learning for Self-Driving Cars - paper presentation - Blog article
- [3] Exploring the Limitations of Behavior Cloning for Autonomous Driving - CVF - Toyota Research Institute - ICCV 2019
"As soon as it works, no one calls it AI anymore."
— John McCarthy (AI effect)